豊田高専情報工学科の卒業研究。
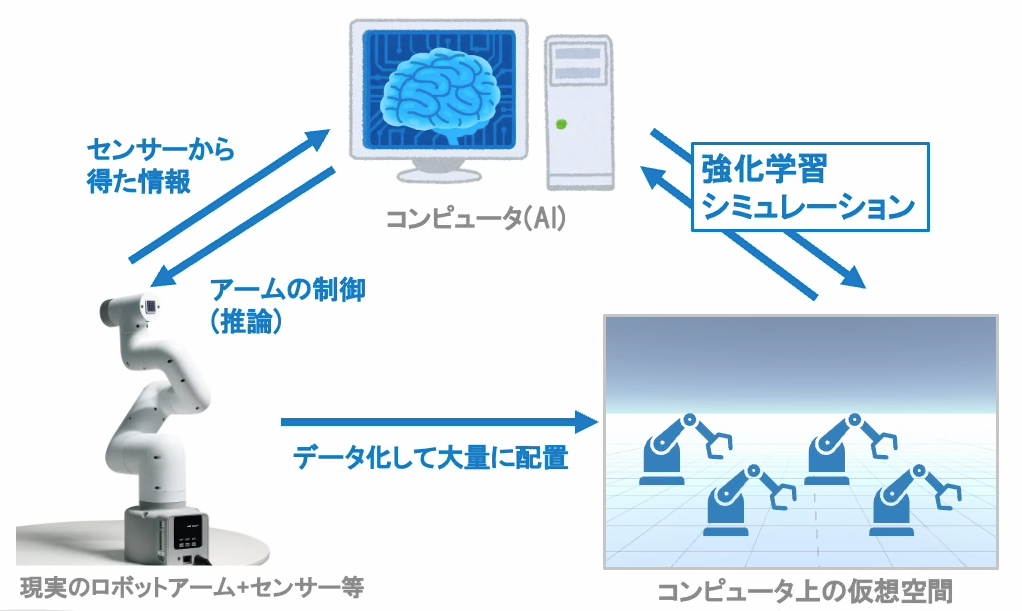
仮想空間内にロボットアーム及びセンサーを配置し、強化学習を大量にシミュレートすることで得た学習モデルを現実で用いれるか検討し、逆運動学等のルールベースによる従来の制御手法と比較する。 ロボットアームとしてmyCobot、シミュレーションソフトとしてUnityを使用。
仮想空間内にロボットアーム及びセンサーを配置し、強化学習を大量にシミュレートすることで得た学習モデルを現実で用いれるか検討し、逆運動学等のルールベースによる従来の制御手法と比較する。 ロボットアームとしてmyCobot、シミュレーションソフトとしてUnityを使用。